构建通用舵机伺服控制系统的半实物仿真实验平台,具有全数字仿真、快速控制原型验证、硬件在回路仿真的功能。完成控制算法软件的仿真、软件测试;硬件电路的实现、制板,评估优化传动系统的性能,实现舵机的快速论证、设计、集成、测试和验证。
【特征优势】
系统采用模块化设计,主要包括建模开发环境、快速原型仿真单元、数据采集测试和分析单元。
能够生成实时代码,加载到实时仿真计算机运行。可监视模型运行状态及关键信号,并支持在线修改参数。
具备舵机数据采集和分析测试单元。
仿真机配备实时反射内存网络接口,具备和飞控快速原型开发系统的对接功能。
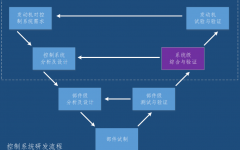
【系统结构】

系统总体架构图
【功能描述】
(1) 系统具备建模开发环境,包含精确的控制电路、伺服电机、电机驱动器、减速传动机构、非线性因素(包括摩擦、传动间隙等)仿真模型;
(2) 能够进行舵机系统全数字仿真,控制策略的设计、控制算法的虚拟验证、各分组件参数指标的分配;
(3) 具备快速控制原型验证功能。
【应用领域】
舵机快速原型设计系统适用于舵机设计和研发单位,可进行舵机验证、开发阶段的功能和接口测试,进行舵机性能测试。