半实物仿真
又称为硬件在回路中的仿真(Hardware in the Loop Simulation),是指在仿真实验系统的仿真回路中接入部分实物的实时仿真,实时性是进行半实物仿真的必要前提。
半实物仿真相较于其他类型的仿真方法,可以更经济地实现更高真实度的仿真效果。从系统的观点来看,半实物仿真允许在系统中接入部分实物,意味着可以把部分实物放在系统中进行考察,从而使部件能在满足系统整体性能指标的环境中得到检验。
因此半实物仿真是提高系统设计可靠性和研制质量的必要手段。
仿真技术的兴起与发展
仿真方法的应用最早可追溯到1773年, 法国自然学家用仿真方法做物理实验估计值。1876年美国统计学家第一次用仿真方法做随机数实验。1908年W.S.Gosset用仿真方法证明了t分布法。20世纪40年代初美国开始了飞行模拟器的设计。1966年美国麻省理工学院的林肯实验室开始研制头盔式显示器。1983年美国的先进防御研究项目署开始开发实用的虚拟战场,设计出SIMNET系统。1989年形成了约260个地面装甲仿真器及通迅网络、指挥所和数据处理设备等互联的网络,结点分布在美国和德国的11个城市。1989年北欧制定欧几里德计划,将仿真技术作为11项优先合作发展的项目之一。1992年美国提出22项国家关键技术,仿真技术列第16项;提出21项国防关键技术,仿真技术列第6项。20世纪90年代美国进行了扩展的防空仿真系统( EADSIM) 计划,该系统用于攻防体系对抗研究的作战仿真系统。
近年来美国更加重视仿真,将发展合成仿真环境作为国际科技发展的7个科技推动领域之一。因此可以说仿真技术是科学实验的有效手段, 对科学技术的发展起到了巨大的推动作用。

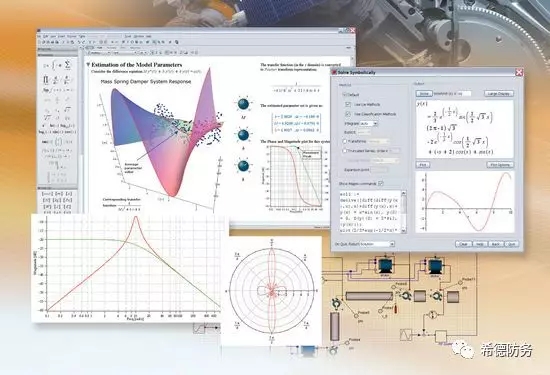
图1 波音飞机半实物仿真环境
半实物仿真技术自 20 世纪60年代问世以来,在美国航天飞机研制领域始终盛行不衰。美国人非常重视这方面的研究和应用,把模拟和仿真技术看作是降低导弹防御和战术导弹武器系统生命周期费用的切实可行的手段。 在制导武器系统的开发方面应用模拟和仿真技术已经有很长的历史,认为系统仿真是武器研制成功的关键。
美国大多数主要的航天和国防承包商都有一个或多个半实物仿真试验室, 这些实验室代表了当前世界先进水平。其先进性体现在高速高精度的仿真机和先进完备的环境模拟设备。
在国内,半实物仿真技术在导弹制导、火箭控制、卫星姿态控制等应用研究方面也达到了较高水平。
半实物仿真在飞行器领域的应用与环境组成
20世纪80年代我国建设了一批高水平、大规模的半实物仿真系统, 如射频制导导弹半实物仿真系统、红外制导导弹半实物仿真系统、歼击机工程飞行模拟器、歼击机半实物仿真系统、驱逐舰半实物仿真系统等。这些半实物仿真系统在武器型号研制中发挥了重大作用。
20世纪90年代我国开始对分布交互仿真、虚拟现实等先进仿真技术及其应用进行研究,开展了较大规模的复杂系统仿真,由单个武器平台的性能仿真发展为多武器平台在作战环境下的对抗仿真。
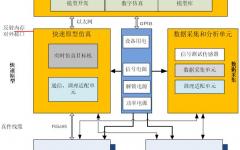
目前国际大型客机与战机都建设了相应的半实物仿真环境,国内各大主机厂所和战术导弹研发基地也有相应的半实物仿真试验环境。大型飞机的半实物仿真环境也称为“铁鸟试验环境”,铁鸟环境主要由以下模块组成:
即飞机半实物仿真环境的“大脑”,实时接收仿真试验中姿态角、姿态角速率和舵机等数据并进行控制律解算,再将解算得出的控制信号实时发送给ITF系统;
即系统试验器,负责对飞控计算机与半实物仿真环境进行数据交联与换算,内部集成丰富的I/O、AD/DA等接口,并具备多种操作界面以便于对飞机多余度控制、故障定位等试验进行仿真模拟;
该单元集成了飞机真实陀螺仪、加速度计和大气机等设备,并加入转台模拟惯导计算机的真实三维运动,输出传感器等数据给飞控计算机,模拟飞机飞行过程的真实运动;
铁鸟以钢制或者复合材料装配飞机方向舵、副翼、平尾、前襟和鸭翼等舵面,并集成相应的舵机和传感器,用于模拟飞机飞行过程中各个舵面的运动与舵偏舵效;
.jpg")
图2 C919飞机铁鸟试验台
视景一般配备有座舱与球幕,主要用于模拟飞机飞行过程中真实的地景与空中环境,以及飞机真实机动动作,以便于驾驶员在地面对飞行品质进行体验和评估。
.jpg")
图3 新舟60飞机多维运动模拟器
通用飞行器半实物仿真核心技术
通用飞行器半实物仿真技术日新月异,但万变不离其宗,其核心技术主要有以下几个方面:
◆ 建模途径
建立模型需要确定模型的结构和参数,一般有三种途径:
(1)对内部结构和特性清楚的系统,利用已知的一些基本定律,经过分析和演绎推导出系统模型;
(2)对那些内部结构和特性不清楚的系统,可假设模型并通过试验验证和修正建立模型,也可以用辨识的方法建立模型;
(3)对于内部结构和特性有部分了解,但又不甚了解的则采用以上两种方法相结合的方式。
◆ 建模方法
随着仿真应用范围的不断拓宽,近年来系统建模理论与方法的研究范围逐渐从定量系统向定性系统拓宽,其中典型的定性系统建模方法有Kuiper法以及各类基于模糊理论的方法等。此外在离散事件系统及各类并发分布系统的建模方法中,Petri网及Bond图方法及其应用也有较快的发展。从建模的方法来看,除了典型的机理建模及系统辨识方法外,近年来积极发展的模糊优化法、人工智能辅助建模方法及混合模式( multi paradigm)的建模方法等。
VV&A(verification,validation and accreditation) 技术,即系统模型的校核、仿真模型的验证以及仿真结果的认可技术,已成为复杂系统建模与仿真技术中的重要课题,受到各方面,尤其是军事部门的高度重视,并正从局部的、分散的研究向实用化、自动化、规范化与集成化的VV&A系统发展。
◆ 仿真算法
仿真算法是将系统模型转换成仿真模型的一类算法,经历了从串行算法到并行算法的发展过程。目前连续系统与离散事件系统的非实时串行算法已相当完善,其成果包括处理线性、非线性、刚性、间断右函数等连续系统算法,各类分布参数系统算法,各种随机统计算法及基于系统分割、方法分割和时间分割的部分并行算法。
当前研究的重点是实时连续系统算法、各类系统的并行算法及定性系统算法, 其中并行系统算法的效率将是并行仿真计算机发展中的关键课题。
◆ 仿真运动环境模拟技术
半实物仿真都需要运动环境模拟器,具体包括角运动模拟器和目标运动模拟器。角运动仿真器用于复现被测实物(如导弹、航天器)本身的短周期运动,目标运动模拟器用于模拟被测实物相对目标的运动。
目前角运动仿真器较为常用的转台为二轴或三轴。为实现精确模拟, 需要解决以下几项关键技术:低惯量、高刚度的框架材料和结构;高功率、低惯量的电动或液压马达;高频响、高线性度、低滞后的伺服阀; 高频响、高精度、超低速的高性能数字控制方法及多轴运动耦合的解耦技术等。
据文献记载,美国生产的S458R-5SE型红外/激光仿真器可以给被测设备提供47600NM的转动扭矩;S-593R-5E型仿真器的内三轴(实现飞行运动仿真)和内目标转轴可以实现连续转动,负载重115Kg,横滚/俯仰/方位内三轴的最大加速度为8000/4000/4000/s2, 伺服带宽为40/30/30Hz,而其定位精度为2”。
目前美国正在研制一种概念型的高频运动仿真器,要求其每个控制环节的带宽达到1000Hz, 这个数值远远超过了传统仿真器的50Hz的极限值,同时除了为被体验体提供3个转动自由度外,还可提供3个平移自由度。这样就可以更逼真地模仿被测实物的实际振动。
◆ 对象和环境特性仿真技术
对于电磁和光学效应这两种目标环境, 各国普遍研究和利用的有两种半实物仿真系统:一种是射频仿真系统用于复现雷达目标的射频环境(包括目标、背景和干扰),在不同频段上产生多种射频目标和背景是现在射频仿真系统目标仿真的发展方向;另外一种是红外仿真系统。
随着科技的发展,当今红外导弹探测目标时,看到的不再是一个点而是目标的红外图像。目前各国均在研制红外成像的制导武器,这样不仅可提高对目标的辨识能力,而且可提高武器系统的杀伤效率。
应用半物理仿真方法研究红外成像导引头是较为实用的方法, 其中的关键技术是目标与环境的动态红外图像的实时生成。另外为了适应带有射频/红外双模式导引头导弹试验的需要,可在一台设备上产生这两种目标和背景的半仿真系统也是将来必须研究的课题。
◆ 仿真软件
仿真研究的许多活动是通过仿真软件来实现的。仿真软件是一类面向仿真用途的专用软件,其特点是面向问题、面向用户。自1955年第一个数字仿真软件问世以来,按新技术出现的时间可将仿真软件的发展分为5个阶段:
(1)通用程序设计语言(如Fortran,1960年左右);
(2)多种仿真程序包及初级仿真语言(1960~1970年,如GPSS);
(3)高度完善的商品化仿真语言( CSSLIV、ACSL、SLAM、ICSL等,20世纪70年代至20世纪80年代初);
(4)一体化(局部智能化)建模与仿真环境(如TESS、IMSE、IMSS,1984 年);
(5)智能化建模与仿真环境(20世纪80年代后期至今)。
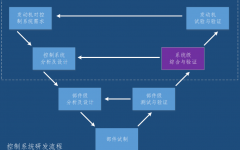
.jpg")
图4 飞行器建模仿真过程
近40年以来,在应用需求的推动下,仿真软件充分吸收了仿真方法学、计算机、网络技术、图形/图像技术、多媒体、软件工程、系统工程、自动控制、人工智能等技术的新成果,从而得到迅速的发展。
从用户建模友好性角度看,由初期的机器代码,经历较高级的编程语言、面向问题描述的仿真语言,发展到模块化概念,进而发展到面向对象编程。
从人机环境的发展角度看,由初期的图形支持到刚性动画、交互式仿真,进一步发展到基于矢量的图形支持,并向虚拟现实发展。
从支持仿真活动的角度看,由支持部分活动发展到支持全生命周期的一体化仿真环境,用于支持活动中的团队工作与流程管理。
不难看出,仿真软件的发展目标一直是不断改善其面向问题、面向用户的模型描述能力及增强它对模型建立、试验、分析、设计和检验的功能。
新技术的不断涌现和发展、建模与仿真技术自身的不断发展、新的建模与仿真方法学的提出以及受实际应用需求的驱动在深度与广度上均加速和拓宽了仿真软件的发展与应用。
◆ 仿真软件未来进一步发展的几个方面:
(1)进一步改善建模仿真功能。仿真软件继续开发引入新的建模仿真方法学,支持模型的中性表达,提高现存和新的仿真模型的可重用性与移植性;采用代理技术,WAVE技术支持分布、开放、复杂动态系统的大规模仿真;在建模仿真过程中应用软件工程和人工智能的方法和工具;采用集成的方法和工具整合结果;
(2)面向全生命周期。强调建模/仿真/实验/验证全生命周期各类活动的优化管理,并发分布交互仿真工程模式将是复杂系统仿真的重要工作模式;
(3)基于标准、基于软总线的开放式体系结构;
(4)更面向专业领域/ 面向用户, 扩大应用领域;
(5)支持虚拟样机开发;
(6)支持分布交互仿真。
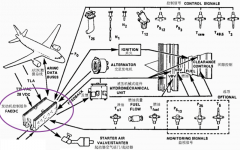
◆ 仿真系统通讯接口技术
仿真系统的接口包括设备接口和人-机接口。目前导弹和航天器仿真主要涉及实物系统的连接,其半实物仿真试验有两种情况:一种用于系统性能而尽可能多地接入实物的半实物仿真试验;另一种用于检验飞行软件而仅含控制计算机实物的半实物仿真实验。
在进行仿真试验时,涉及的信息变换接口主要发生在仿真计算机的输入。对于第一种情况的仿真试验,仿真所引入的接口发生在仿真计算机与导航制导设备的环境仿真设备之间;而对于后一种情况的仿真试验,仿真计算机必须直接与控制计算机相连接,需要模拟导航制导设备的输出信号。
目前除了一般的D/A、A/D接口之外,主要的信息转换接口有D/A (或D/D)加正弦调制、D/A(或D/ D)加脉宽调制、D/A(或D/D)加V/f(或 D/f)变换、D/A加V/I变换、D/D变换,其他还有一些地线、阻抗隔离电路和传输电缆。总之接口连接中不应该引入干扰和畸变。
.jpg")
图5 飞行器虚拟现实技术
◆ 虚拟现实技术
虚拟现实(virtual reality)技术是现代仿真技术的一个重要研究领域,其核心是建模与仿真。通过建立模型,对人、物、环境及其相互关系进行本质的描述,并在计算机上实现,从根本上改变了人与计算机的关系。
飞行器模拟、虚拟战场、虚拟样机、虚拟制造等均是虚拟现实技术的典型应用。虚拟现实技术是在综合仿真技术、计算机图形技术、传感技术、显示技术等多种学科技术的基础上发展起来的,它以仿真的方式使人置身于一个虚拟世界中。
3个I是虚拟现实的基本特征,即沉浸(immersion)、交互(interaction)、构思(imagination)。我们可以沉浸在一个由计算机系统所创造的虚拟环境中,与虚拟环境发生交互作用,并得到与实际的物理参与联试所能获得的相同或相似的感受。
进一步的研究包括分布式虚拟环境、虚拟环境建模、分布式可交互环境数据库、虚拟环境显示、虚拟测试、分布式多维人机交互及标准化等。
21世纪,无人机与智能化飞行器技术发展迅猛,对于无人机的半实物仿真环境建设要求也日益提高。仿真建模是系统仿真的基础。在全数字仿真结合半实物仿真的今天,系统仿真能否达到预期的效果,数学模型将起到关键作用。
动态建模和大系统建模将走向实用化,环境模拟设备将向着空间集成化、机械轻量化和试验多功能化的方向发展。研究并组建适合每个飞行器的半实物仿真环境,是飞行器研发过程所不可或缺的一个关键环节。