利用LabVIEW虚拟仪器开发平台,设计一个程序,可以对3阶以内的线性被控对象快速的确定PID控制器的各个参数,完成PID控制器的设计并给出控制系统开环或者闭环的阶跃响应。
PID控制调节原理简单,易于整定、使用方便,是历史最悠久、控制性能最强的基本调节方式,广泛地应用于机电、冶金、机械、化工等各个工业生产部门。
LabVIEW是实验室虚拟仪器集成环境(Laboratory Virtual Instrument Engineering Warkbench)的简称,是美国NI公司推出的虚拟仪器开发平台软件,具有简洁的图形化编程环境和强大的功能。它广泛地应用于数据采集与控制、信号处理、数据显示、数据分析等领域。
PID控制原理
PID控制是从比例、积分和微分三个环节来实现对系统控制的。常规PID控制系统原理框图如图1所示,该系统由模拟PID控制器和被控对象组成。


式中kp、Ti、 Td 分别为比例系数、积分时间常数、微分时间常数。
比例环节成比例的反映控制系统的偏差信号,一旦产生偏差,控制器就产生控制作用,来减少偏差。积分环节主要用于消除静态误差,提高系统的无差度。积分作用的强弱取决于时间常数Ti. 。Ti越小,积分作用越强。微分环节反映偏差信号的变化趋势,在系统中引入一个有效的提前修正信号,来加快系统的动作速度,缩短调节时间。
LabVIEW及其PID工具包简介
LabVIEW自1986年推出以来,经过十几年的时间,发展到以最新版本LabVIEW8.2为核心,包括控制与仿真、高级数字信号处理、模糊控制和PID控制等众多的附加软件包,可运行于Windows、Linux、Sun和HP-UX等多种平台。
LabVIEW提供了一种全新的编程方法,即采用编译型图形化编程语言―G语言(GraphProgramming)。用户设计好程序的框架之后,只需把系统提供的各种图形化功能模块连接起来,即可得到所需的应用程序。LabVIEW中的程序称为虚拟仪器 (virtual instruments)程序,简称VI.。每个VI都由前面板、框图程序和图标/连接端口三部分组成。前面板就是图形化用户界面,用于设置输入数值和观察输出值;框图程序利用图形语言对定义在前面板上的控制量和指示量进行编程;图标/连接端口则可以把VI定义为一个子程序(subVI),使其能被别的VI调用。
LabVIEW的PID控制模块包含PID和模糊逻辑控制以及其它先进控制函数。利用NI的基于LabVIEW的PID工具包(PID Toolkit),不但可以在LabVIEW 环境下通过友好的人机交互界面直观方便地进行控制器的设计,还能充分利用LabVIEW 的各种强大功能,特别是同数据采集板卡等硬件的良好结合,迅速地搭建所需的自动控制系统,进行仿真及实际应用。
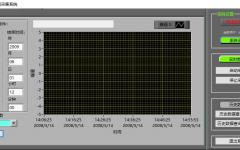
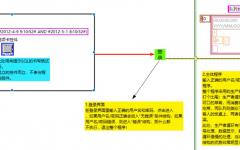
初始值0~期望值80,PID调节程序如下图所示:

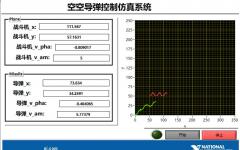
期望值10~期望值50,PID调节程序如下图所示:

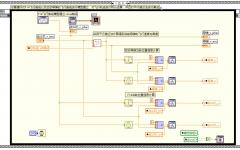
后面板程序如下图所示:

源程序下载:
论文: