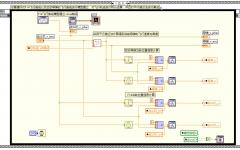
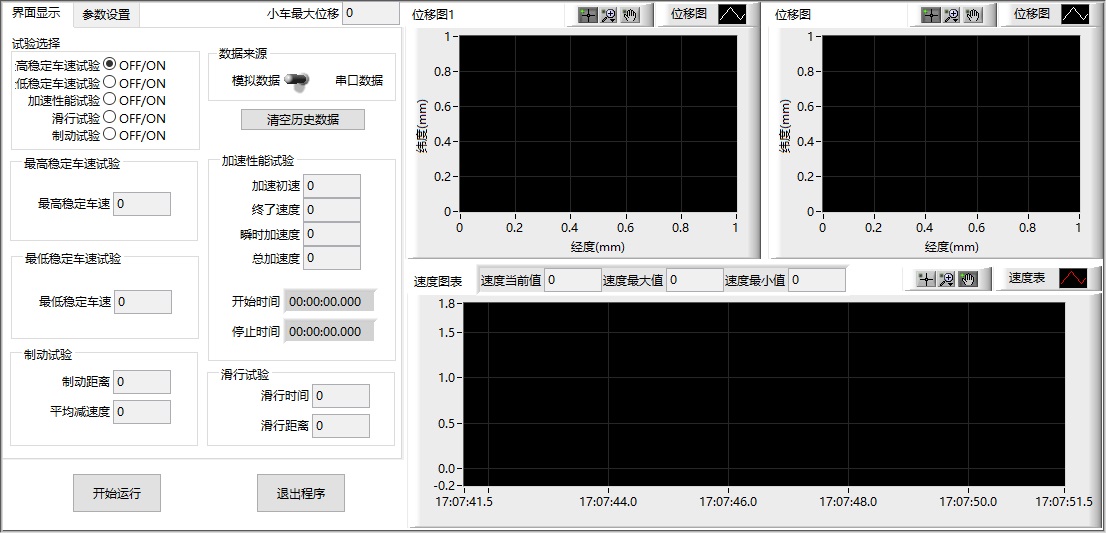
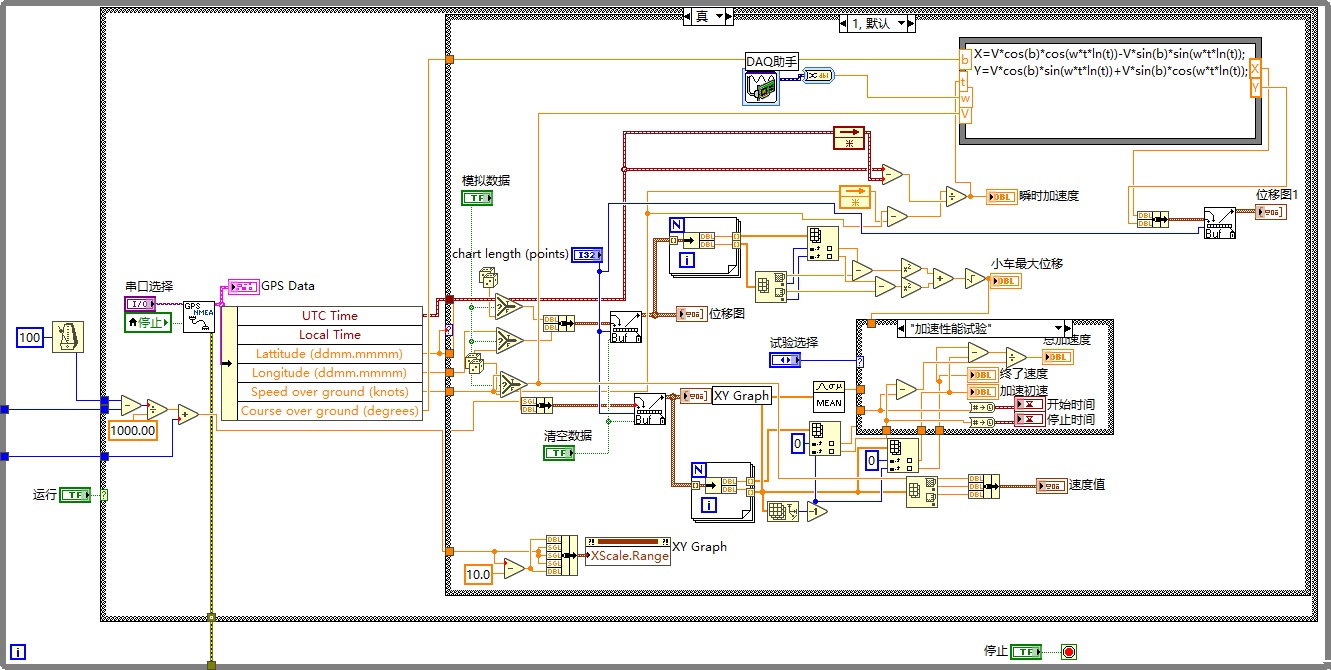
基于Labview开发GPS软件
串口通讯读取GPS定位模块
最高稳定车速试验
最低稳定车速试验
加速性能试验
制动试验
滑行试验
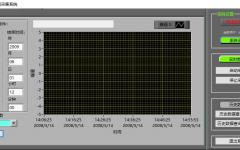
波形显示、数据分析等
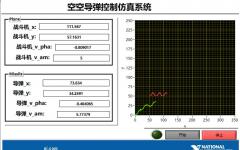
计算方法X=V*cos(b)*cos(w*t*ln(t))-V*sin(b)*sin(w*t*ln(t));
Y=V*cos(b)*sin(w*t*ln(t))+V*sin(b)*cos(w*t*ln(t));

基于Labview开发GPS软件
串口通讯读取GPS定位模块
最高稳定车速试验
最低稳定车速试验
加速性能试验
制动试验
滑行试验
波形显示、数据分析等
计算方法X=V*cos(b)*cos(w*t*ln(t))-V*sin(b)*sin(w*t*ln(t));
Y=V*cos(b)*sin(w*t*ln(t))+V*sin(b)*cos(w*t*ln(t));

实例包括:DAQmx持续读取,Excel相关,Google_Earth和lv,labview8.6如你所愿,labview8.6自动连接条件结构,labview钢琴,LEDX控制,LED控制,PPT设定,Prot..

2013天下会第一轮_串口调试助手_xfwhut.zip
注册时间:2024-12-23 09:48:46
注册时间:2024-12-21 15:45:59
注册时间:2024-12-20 09:42:58
注册时间:2024-12-05 16:34:39
注册时间:2024-11-14 08:49:44