关键词:LabVIEW;步进电机;并口通讯
1 前言
在步进电机控制系统设计中, 传统的设计方法是用逻辑电路或单片机实现步进电机控制, 但由于线路复杂而且制成后不易调整, 所以存在一定的局限性。后来采用虚拟仪器图形化编程软件压来控制步进电机, 硬件结构上变得十分简洁, 软件上编程简单, 而且有较好的人机交互界面, 根据不同的要求可随时调整控制方式。
与现在国内普遍采用的控制电机方式一用通过运动采集卡来控制步进电机相比, 本文采用的计算机并口作为连接机和步进电机驱动器的通讯媒介来传输脉冲信号的方式, 不仅价格低廉, 而且更加容易推广。
2.系统控制的研究方案
2.1系统总体的电气控制结构图
步进电机是整个系统运转的动力机构, 驱动控制系统包括两大部分, 一个是步进电机驱动部分,即硬件的驱动部分, 还有一个是机的软件驱动部分, 即用发的软件系统。
这两大部分用计算机并口线打印线接。并口通讯在整个系统中完成软件和硬件的衔接的工作, 主要用作数据传输、控制以及数据采集等。控制系统结构图如图所示

整个的硬件控制系统是由几个单一功能的模块相互联系而组成的。将系统模块化, 便得到各个模块在整个系统中所执行的功能。其中电脑中安装了应用软件, 起控制电机的作用, 将通过算法得出的相应坐标量转换成电机转动量步进电机驱动器起将并口传输过来的脉冲信号进行转换、放大, 然后输送到步进电机, 来最终达到控制步进电机的作用。
2.2技术方案
本设计使用的步进电机驱动器的驱动电路是经典的集成块组合电路, 双极性驱动二相永磁步进电机及二相四相合式步进电机。主控制器采用机控制, 软件采用编写开发。信号通讯媒介采用并口来实现。十步进电机驱动器技术参数为供电电源推动电压为一, 前置输人为输出电流为峰值相动方式为恒相电流励磁方式为整步、半步细分。

3.简介并口模块程序设计
现简介美国出的虚拟仪器开发平台, 它用图标代替文本代码创建应用程序, 拥有流程图程序设计语言的特点, 执行顺序是依方块图间数据的流向来决定的, 而不像一般通用的编程语言逐行地执行在编写方块图程序时, 只需从功能模块中选用不同的函数图标, 然后
再以线条相互连接, 即可实现数据的传输。与一般的程序相比, 供了三个浮动的图形化工具模板, 分别是工具模板、控制模板和功能模板。这三个模板功能强大, 使用方便, 表示直观, 是用户编程的主要工具。
3.2并行接口简介
在整个系统中, 并口编程模块的设计是连接电气控制部分和机械系统的关键环节。并行接口有三大类, 一是标准并行接口, 二是增强型并行接口, 三是扩展型并行端口。机几一般都配有至个并行口, 其通过针插座与其它设备相连。该接口内有个输出锁存输入缓冲器。它们占用了个端口。第个地址是,为数据口。第个地址是, 为状态输入口。第个地址是, 为控制信号输出口, 通常为了使程序具有通用性, 可以从注册表中取得这个地址, 对于而言, 这个值被存储在〕。然后就可以通过对这三个端口进行控制达到简单的并口编程目的。整个并日有根可用信号线, 其它一号引线为接地线。
3.3并口线的设计连接方式与改装
对于步进电动机控制系统的运动, 只要能向驱动器发出两路信号就可满足要求一路为控制脉冲方波信号另一路为正反转控制方向电平信号。但步进电机驱动箱的接口不是按照并口的标准来设计和连接, 而电脑的并口管脚配置却是按照并口的标准来分配的。因此为了跟步进电机驱动器的线路进行匹配, 必须对并口线里面的接线进行重新设计, 让机发出的信号能够稳定、高效地传输到步进电机驱动器上去。
并口线一共有根线, 控制步进电机只需利用其中的根线。其中分脉冲信号控制线三根, 方向信号控制线三根, 行程开关信号接收线三根, 以及一根地线。剩下的巧根线一律不接或者一端悬空, 主要的原因是不让它产生干扰, 从而影响其它的数据线的正常数据发送和接收。可以不改动电脑并口接线, 只需改接电机驱动箱的接口线。
通过对程序和并口管脚的定义及特点的分析,确定步进电机驱动箱并口的第2、3、4、5、6、15、17、18、19分别对应接机并口的第10、11、4、5、6、12、7、8、9管脚, 另外步进电机驱动箱并口的第管脚接机的第的任意一个管脚。其中, 步进电机驱动箱并口的第4、5、6和第7、8、9分别对应的是电机X、Y、Z的脉冲信号控制线和正反转控制线, 第2、3、15巧对应的是行程开关控制线, 另外第14管脚接的是系统地线。
3.4并口的编程方法和数据传输
在机上LabVIEW作为前台的界面及数据处理工具的应用大大简化了上位机的软件开发, 并且方便了各种不同数据处理程序的调用和具有较好的人机交互界面。在中的子中LabVIEW, 并没有对并口进行反向传输的功能, 只能进行传统的正向传输, 所以不能直接进行调用。但是中有对寄存器直接读写的个子,和。可直接进行寄存器的读写操作, 从而改变并口端口的数值, 从而输出相应信号LabVIEW这样就大大地保证了脉冲信号的精确发出和行程开关信号的有效接收。图为并口编程方法和数据传输方法

计算机程序是通过改变并口寄存器的值来控制输出并口线的数值, 寄存器一共有位32, 每一位对应的值有两个, 0或1。通过不断的探索实验, 终于确定了寄存器的第26、27、28、29、30、31位分别对应于并口的第4、5、6、7、8、9口。因此只要编写程序将脉冲信号输人并口的相应寄存器上, 就可以达到控制并口相应位输出需要的脉冲。行程信号的采集是通过。这个子来实现。
4.系统控制程序实现
本文采用模块化程序设计思想, 设计系统的控制程序, 用设计的系统连接绘图仪进行绘图试验,来验证设计的合理性。
4.1绘图系统总体程序流程图
当开始绘图之前, 首先需要将刀具复位到初始原点, 以便在绘图时准确定位。所以首先让电机转动, 使绘图笔向原点靠近, 待行程开关触发后将脉冲输到机, 然后控制电机停止转动, 此时刀具在起始位置。下一步, 输人脉冲, 使电机转动到绘图初始位置, 即让刀具接近或者接触被绘图物。当到达初始位置后, 启动电机, 开始绘图。当绘图结束后,电机停止转动, 然后再返回刀具起始位置。图为4系统总体程序流程图

4.2从获取的图形数据数组来画图
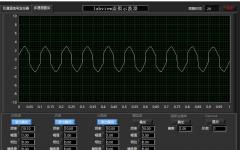
LabVIEW作为图形化编辑软件, 不断可以采集外界的信号, 同时本身能够产生各种规则信号, 因此将采集的模拟信号数字化或者本身发生的信号的数据作为脉冲程序控制源, 只要控制好一定的时序, 就能使信号波形通过步进电机转动的方式让它画出来。
编程时把正弦信号作为输人信号进行阐述。首先, 通过正弦信号发生器产生正弦信号数据数组,然后通过簇输送到波形显示器上去让它显示。同时从数据数组线中分出一根作为脉冲控制信号输到定时循环里面, 作为脉冲控制信号线。定时循环里面, 利用等长时间长度的方法对正弦信号进行采样, 然后将采样得到的数值存入数组, 将数组数据对位操作, 然后转换成相应、轴电机驱动器脉冲数, 完成对、轴电机转速以及方向的控制, 最后将正弦信号在绘图平台上用步进电机相对应运动的方式把它画出来。正弦信号的波形可以画出来之后, 其它的波形信号同理也可以输入到循环里面,让它按程序设定画出来。图5为系统画正弦图形的程序控制图。

5.总结
该系统软件部分采用美国公司的虚拟仪器开发软件进行开发, 编写了相应的轨迹控制程序, 设计了简单易于控制的控制面板, 同时根据并口通讯的特点, 采用并口作为连接机和步进电机驱动器的通讯媒介来传输脉冲信号, 克服了并口传输电压与步进电机驱动器的脉冲驱动电压不匹配的问题, 以及并口信号的传输速率与脉冲相应的速率的匹配等诸多问题。在调试过程中, 通过定时循环方法对其加以控制, 成功地解决了机发出信号频率不稳定的问题, 并且找到了驱动步进电机的最佳脉冲控制频率范围。最终实现用LabVIEW图形化编程软件对步进电机的控制和显示。